
Перейти в хранилище документации
Обратиться в техническую поддержку![]()
Для настройки детектора Распознавание TC RR необходимо:
По умолчанию детектор включен и настроен на распознавание транспортных средств.
При необходимости можно изменить настройки параметров детектора, которые указаны в таблице:
| Параметр | Значение | Описание |
|---|---|---|
| Характеристики объекта | ||
| Видеопоток | Основной поток | Если видеокамера поддерживает многопоточность, выбрать поток, на котором необходимо осуществлять детектирование. Выбор видеопотока низкого качества позволяет снизить нагрузку на Сервер |
| Второй поток | ||
| Запись траекторий объектов | Да | По умолчанию включена запись метаданных видеопотока в базу данных. Для отключения выбрать значение Нет |
| Нет | ||
| Другое | ||
| Включить | Да | По умолчанию детектор включен. Для отключения установить значение Нет |
| Нет | ||
| Имя | Распознавание TC RR | Ввести имя детектора или оставить имя по умолчанию |
| Прореживание видеопотока | Да | По умолчанию параметр Прореживание видеопотока выключен. Использование данной возможности снижает нагрузку на Сервер, но при этом снижается качество детектирования. Для декодирования только ключевых кадров установить значение Да. Рекомендуется активировать данный параметр для "слепых" (без отображения видеоизображения) Серверов, на которых необходимо вести детектирование. Для кодека MJPEG прореживание не актуально, так как каждый кадр считается ключевым |
| Нет | ||
| Режим работы декодера | Auto | Выбрать процессор для декодирования видео. При выборе GPU приоритет отдается дискретной видеокарте (декодирование на чипах NVIDIA NVDEC). Если подходящего графического процессора нет, то декодирование будет осуществляться с помощью технологии Intel Quick Sync Video. Иначе декодирование будет осуществляться на CPU |
| CPU | ||
| GPU | ||
| HuaweiNPU | ||
| Тип | Распознавание TC RR | Название типа детектора (нередактируемое поле) |
| Основные настройки | ||
| Алгоритм обнаружения направления движения ТС | По координатам TC | По умолчанию используется алгоритм По координатам TC, который работает следующим образом: если координаты транспортного средства смещаются сверху вниз (транспортное средство движется к камере) и если координаты транспортного средства смещаются снизу вверх (транспортное средство движется от камеры). Установить значение По изменению масштаба TC, если в окне видеонаблюдения масштаб транспортного средства увеличивается (транспортное средство движется к камере) и если масштаб транспортного средства уменьшается (транспортное средство движется от камеры) |
| По изменению масштаба TC | ||
| Режим работы детектора | CPU | Выбрать процессор для работы детектора — центральный или графический процессор NVIDIA (см. Общие сведения о настройке детекторов) Внимание! Запуск работы алгоритма на NVIDIA GPU после применения настроек может занимать несколько минут. |
| Nvidia GPU 0 | ||
| Nvidia GPU 1 | ||
| Nvidia GPU 2 | ||
| Nvidia GPU 3 | ||
| Расширенные настройки | ||
| Высота области определения скорости | 0 | Внимание! Перед тем как задать значение для параметра Высота области определения скорости, необходимо в окне предварительного просмотра выделить область (см. Рекомендации по настройке области определения скорости движения транспортных средств). |
| Изменение размера кадров | 1920 | По умолчанию при анализе осуществляется сжатие размера кадра до установленного размера (по умолчанию 1920 пикселей по бо́льшей стороне). Значение должно быть в диапазоне [640, 10 000]. При этом используется следующий алгоритм:
Примечание Например, исходное разрешение видеоизображения 2048*1536, заданное значение 1000. В этом случае исходное разрешение 2 раза будет поделено пополам (512*384), т.к. после первого деления значение по бо́льшей стороне кадра будет больше заданного (1024 > 1000). Если детектирование осуществляется на потоке с бо́льшим разрешением и происходят ошибки детектирования, рекомендуется уменьшить сжатие. |
| Определение скорости | Не выбрано | Выбрать из списка режим определения единицы измерения скорости транспортных средств |
| Км/ч | ||
| Миль/ч | ||
| Период (мсек) обработки кадров | 750 | Задать время в миллисекундах между операциями поиска транспортных средств в кадре. Чем больше это значение, тем меньше будет нагрузка на Сервер, однако при этом часть транспортных средств может быть не распознана. Значение должно быть в диапазоне [1, 10 000] |
| Таймаут события | 0 | Задать в секундах время, через которое необходимо генерировать сработку после распознавания транспортного средства в кадре. Если значение 0, то сработка будет после потери трека с транспортным средством. Значение должно быть в диапазоне [1, 3 600] |
| Территория | Страны СНГ | Выбрать территорию распознавания транспортного средства
|
| Другие страны | ||
| Точность и производительность | Средняя точность и высокая производительность | Выбрать точность и производительность распознавания транспортного средства:
|
| Высокая точность и средняя производительность | ||
| Ширина области определения скорости | 0 | Внимание! Перед тем как задать значение для параметра Ширина области определения скорости, необходимо в окне предварительного просмотра выделить область (см. Рекомендации по настройке области определения скорости движения транспортных средств). Задать ширину области определения скорости в метрах. Значение должно быть в диапазоне [0, 500] |
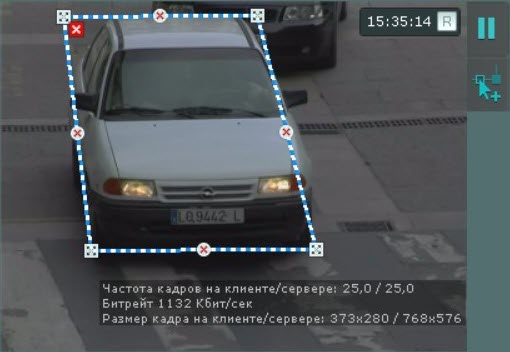
По умолчанию анализируется весь кадр видеоизображения. Если необходимо анализировать только часть кадра видеоизображения, то в окне просмотра нужно задать область, в которой будет осуществляться детектирование и распознавание транспортных средств. Область настраивается путем перемещения узловых точек ![]() .
.
Примечание
Для сохранения изменений параметров детектора нажать на кнопку Применить ![]() . Для отмены изменений параметров нажать на кнопку Отмена
. Для отмены изменений параметров нажать на кнопку Отмена ![]() .
.