
Перейти в хранилище документации
Обратиться в техническую поддержку![]()
Для настройки детектора Распознавание TC RR необходимо:
По умолчанию детектор включен и настроен на распознавание транспортных средств.
При необходимости можно изменить настройки параметров детектора, которые указаны в таблице:
| Параметр | Значение | Описание |
|---|---|---|
| Характеристики объекта | ||
| Видеопоток | Основной поток | Если видеокамера поддерживает многопоточность, выбрать поток, на котором необходимо осуществлять детектирование. Выбор видеопотока низкого качества позволяет снизить нагрузку на Сервер |
| Второй поток | ||
| Запись траекторий объектов | Да | По умолчанию включена запись метаданных видеопотока в базу данных. Для отключения выбрать значение Нет |
| Нет | ||
| Другое | ||
| Включить | Да | По умолчанию детектор включен. Для отключения установить значение Нет |
| Нет | ||
| Имя | Распознавание TC RR | Ввести имя детектора или оставить имя по умолчанию |
| Режим работы декодера | Auto | Выбрать процессор для декодирования видео. При выборе GPU приоритет отдается дискретной видеокарте (декодирование на чипах NVIDIA NVDEC). Если подходящего графического процессора нет, то декодирование будет осуществляться с помощью технологии Intel Quick Sync Video. Иначе декодирование будет осуществляться на CPU |
| CPU | ||
| GPU | ||
| HuaweiNPU | ||
| Тип | Распознавание TC RR | Название типа детектора (нередактируемое поле) |
| Основные настройки | ||
| Алгоритм обнаружения направления движения ТС | По координатам TC | По умолчанию используется алгоритм По координатам TC, который работает следующим образом: если координаты транспортного средства смещаются сверху вниз (транспортное средство движется к камере) и если координаты транспортного средства смещаются снизу вверх (транспортное средство движется от камеры). Установить значение По изменению масштаба TC, если в окне видеонаблюдения масштаб транспортного средства увеличивается (транспортное средство движется к камере) и если масштаб транспортного средства уменьшается (транспортное средство движется от камеры) |
| По изменению масштаба TC | ||
| Режим работы детектора | CPU | Выбрать процессор для работы детектора — центральный или графический процессор NVIDIA (см. Выбор Nvidia GPU при настройке детекторов) Внимание! Запуск работы алгоритма на NVIDIA GPU после применения настроек может занимать несколько минут. |
| Nvidia GPU 0 | ||
| Nvidia GPU 1 | ||
| Nvidia GPU 2 | ||
| Nvidia GPU 3 | ||
| Расширенные настройки | ||
| Высота области определения скорости | 0 | Внимание! Перед тем как задать значение для параметра Высота области определения скорости, необходимо в окне предварительного просмотра выделить область (см. Рекомендации по настройке области определения скорости движения транспортных средств). |
| Изменение размера кадров | 1920 | По умолчанию при анализе осуществляется сжатие размера кадра до установленного размера (по умолчанию 1920 пикселей по бо́льшей стороне). Значение должно быть в диапазоне [640, 10 000]. При этом используется следующий алгоритм:
Примечание Например, исходное разрешение видеоизображения 2048*1536, заданное значение 1000. В этом случае исходное разрешение 2 раза будет поделено пополам (512*384), т.к. после первого деления значение по бо́льшей стороне кадра будет больше заданного (1024 > 1000). Если детектирование осуществляется на потоке с бо́льшим разрешением и происходят ошибки детектирования, рекомендуется уменьшить сжатие. |
| Определение скорости | Не выбрано | Выбрать из списка режим определения единицы измерения скорости транспортных средств Внимание! Погрешность при определении скорости транспортных средств составляет около 5% при качественной калибровке, так как данный функционал дает только общее представление о ситуации. Потребление ресурсов при включении параметра Определение скорости не меняется. Примечание Для корректного отображения единицы измерения скорости необходимо создать системную переменную MEASUREMENT_UNIT (см. Приложение 9. Создание системных переменных), указав значение:
|
| Км/ч | ||
| Миль/ч | ||
| Период (мсек) обработки кадров | 750 | Задать время в миллисекундах между операциями поиска транспортных средств в кадре. Чем больше это значение, тем меньше будет нагрузка на Сервер, однако при этом часть транспортных средств может быть не распознана. Значение должно быть в диапазоне [1, 10 000] |
| Таймаут события | 0 | Задать в секундах время, через которое необходимо генерировать сработку после распознавания транспортного средства в кадре. Если значение 0, то сработка будет после потери трека с транспортным средством. Значение должно быть в диапазоне [1, 3 600] |
| Территория | Страны СНГ | Выбрать территорию распознавания транспортного средства
|
| Другие страны | ||
| Точность и производительность | Средняя точность и высокая производительность | Выбрать точность и производительность распознавания транспортного средства:
|
| Высокая точность и средняя производительность | ||
| Ширина области определения скорости | 0 | Внимание! Перед тем как задать значение для параметра Ширина области определения скорости, необходимо в окне предварительного просмотра выделить область (см. Рекомендации по настройке области определения скорости движения транспортных средств). Задать ширину области определения скорости в метрах. Значение должно быть в диапазоне [0, 500] |
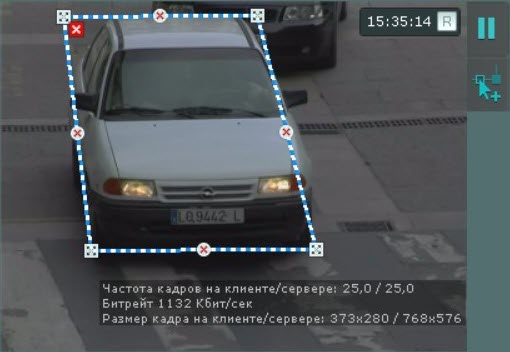
По умолчанию анализируется весь кадр видеоизображения. Если необходимо анализировать только часть кадра видеоизображения, то в окне просмотра нужно задать область, в которой будет осуществляться детектирование и распознавание транспортных средств. Область настраивается путем перемещения узловых точек ![]() .
.
Примечание
Для сохранения изменений параметров детектора нажать на кнопку Применить ![]() . Для отмены изменений параметров нажать на кнопку Отмена
. Для отмены изменений параметров нажать на кнопку Отмена ![]() .
.
Предыдущая страница
![]()
![]() Следующая страница
Следующая страница