
Перейти в хранилище документации
Обратиться в техническую поддержку![]()
...
...
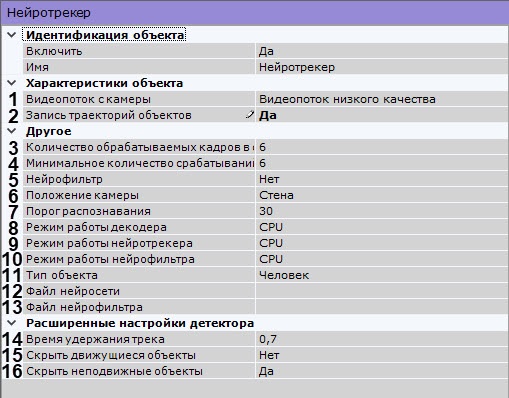
В поле Путь к файлу выбрать файл нейросети (8)Количество обрабатываемых кадров в сек задать количество кадров в секунду, которые будет обрабатывать нейросеть (3). Чем выше значение, тем точнее трекинг, но выше нагрузка на процессор.
| Note | ||
|---|---|---|
| ||
Использование подготовленной нейросети для конкретной сцены позволяет детектировать объекты только определенного типа (например, человек, велосипедист, мотоциклист и т.д.). Для подготовки нейросети необходимо обратиться в компанию ITV|AxxonSoft (см. Требования ко сбору данных для обучения нейросетей). |
| Info | ||
|---|---|---|
| ||
Для корректной работы нейросети в ОС Linux соответствующий файл должен располагаться в директории /opt/AxxonSoft/AxxonNext/. |
В поле Устройство выбрать процессор для работы нейросети - центральный, один из графических или один из процессоров Intel (11, см. Требования к аппаратной платформе для работы нейроаналитики).
| title | Внимание! |
|---|
Рекомендуются значение не менее 6 кадров в секунду. Для быстро перемещающихся объектов (бегущий человек, машина) частота кадров в секунду должна быть не менее 12 (см. Примеры настройки нейротрекера для решения типовых задач). |
В поле Режим работы нейротрекера выбрать процессор для работы нейросети - центральный, один из графических или один из процессоров Intel (9, см. Требования к аппаратной платформе для работы нейроаналитики, Общие сведения о настройке детекторов).
| Note | ||
|---|---|---|
| ||
Рекомендуется использовать графический процессор. Запуск работы алгоритма на NVIDIA GPU после применения настроек может занимать несколько минут. Для ускорения последующих запусков можно использовать функцию кэширования (см. Настройка ускорения запуска нейроаналитики на GPU). При работе нейротрекера на GPU в окне видеонаблюдения может наблюдаться отставание треков от объектов. В этом случае рекомендуется в настройках видеокамеры установить размер буфера равным 1000 миллисекунд (см. Объект Видеокамера). |
В
поле Частота кадров задать количество кадров в секунду, которые будет обрабатывать нейросеть (12). Для всех остальных кадров будет выполняться интерполяция. Чем выше значение, тем точнее трекинг, но выше нагрузка на процессорполе Тип объекта выбрать объект распознавания (11) или в поле Файл нейросети выбрать файл нейросети (12).
| Note | ||
|---|---|---|
| ||
Для подготовки нейросети необходимо обратиться в компанию ITV (см. Требования ко сбору данных для обучения нейросетей). Использование подготовленной нейросети для конкретной сцены позволяет детектировать объекты только определенного типа (например, человек, велосипедист, мотоциклист и т.д.). Если файл нейросети не задан, будет использоваться файл по умолчанию, который выбирается в зависимости от выбранного типа объекта (11) и выбранного процессора для работы нейросети (8). |
| Info | ||
|---|---|---|
| ||
Для корректной работы нейросети в ОС Linux соответствующий файл должен располагаться в директории /opt/AxxonSoft/DetectorPack/NeuroSDK. |
Если не требуется детектировать неподвижные объекты, выбрать Да в поле Скрыть неподвижные объекты (16). При обнаружении подвижные объектов использование данного параметра позволяет уменьшить количество ложных срабатываний. Объект считается неподвижным, если за все время существования его трека он не сместился более чем на 10% от своей ширины или высоты.
| Note | ||
|---|---|---|
| ||
Если неподвижный объект начнет движение, детектор выдаст на него сработку и объект больше не будет считаться неподвижным. |
По умолчанию весь кадр является зоной детектирования. Если необходимо ограничить зону анализа, в окне предварительного просмотра задать одну или несколько областей, в которых необходимо выполнять анализ.
| Info | ||
|---|---|---|
| ||
Задание областей анализа выполняется по аналогии с базовым трекером (см. Задание общих зон анализа ситуации). Однако, для нейротрекера в отличие от базового задаются именно зоны анализа, а не зоны игнорирования. |
Далее следует на базе нейротрекера создать и настроить необходимые детекторы. Их настройка будет осуществляться также, как и для базового трекера (см. Настройка детекторов анализа ситуации на базе трекера объектов).
| Note | ||
|---|---|---|
| ||
Для сработки детектора Движение в области под нейротрекером объект должен сместиться в кадре как минимум на 25% от своей ширины или высоты. |
| Note | ||
|---|---|---|
| ||
Детектор оставленных предметов объектов работает только с базовым трекером объектов. |