Перейти в хранилище документации
Обратиться в техническую поддержку![]()
При работе с детектором Распознавание номеров автомобилей VT и его поддетекторами предъявляются следующие требования:
| Камера |
Рекомендации для высокоскоростных дорог
| ||||||||||||||||
| Освещенность |
| ||||||||||||||||
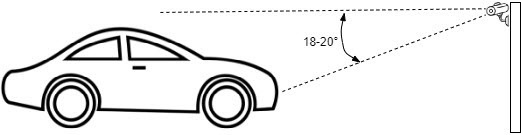
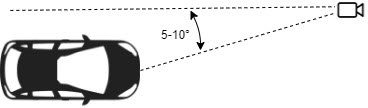
| Сцена и ракурс |
|
Предыдущая страница
![]()
![]() Следующая страница
Следующая страница