
Перейти в хранилище документации
Обратиться в техническую поддержку![]()
...

По умолчанию событие о распознавании номера формируется после исчезновения трека с номером из кадра. Существует возможность формировать событие о распознавании либо по истечении заданного в секундах Таймаута (8), либо по достижении заданного процента схожести в поле Качество отображения номера (3). Если значение обоих параметров отлично от 0, то событие о распознавании будет генерироваться при выполнении первого из двух условий.
| Info | ||
|---|---|---|
| ||
Значение параметра Качество отображения номера не должно быть меньше значения параметра Минимальное сходство. |
Указать максимальное количество потоков распознавания (4). При значении 0 процесс распознавания будет происходить в том же потоке, который его запускает.
| Note | ||
|---|---|---|
| ||
Суммарное значение данного параметра для всех детекторов распознавания номеров не должно превышать: - количество потоков распознавания в лицензии (проверить можно с помощью утилиты lsvpwc, см. документацию производителя); - количество ядер процессора; - 100. |
Задать порог контрастности изображения (6). Значение по умолчанию − 40. На качественном изображении рекомендуется увеличить данное значение до 50-60, на изображении плохой контрастности следует уменьшить данное значение.
При необходимости включить расширенный анализ изображения (7). Если Да − повышается качество распознавания в неблагоприятных условиях (например, если характеристики/настройки камеры не полностью соответствуют требованиям, либо при плохой погоде). Увеличивается время обработки кадра на 20-30% в зависимости от его размера. В нормальных условиях данный параметр не влияет на качество распознавания.
В поле Таймаут трекера задать период времени в секундах, после истечения которого трек автомобиля считается потерянным (9).
| Info | ||
|---|---|---|
| ||
Данный параметр необходимо использовать для исключения двойных сработок, возникающих в тех случаях, когда номер распознается при появлении в кадре, затем перекрывается визуальным препятствием и после этого снова распознается детектором. Если задать таймаут больше, чем время возможного перекрытия номера в кадре, то сработка детектора будет одна. |
При необходимости задать дополнительные настройки. Их описание приведено в таблице.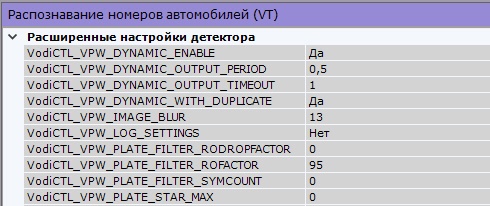
| Параметр | Описание |
| VodiCTL_VPW_DYNAMIC_ENABLE | Включить/выключить динамику распознавания номера (по умолчанию динамика включена). Если установлено значение Да, то работает трекинг и распознавание номера осуществляется по совокупности кадров. В значении Нет трекинг отключен и распознавание номера осуществляется по каждому кадру в отдельности без привязки к предыдущим, при этом качество может варьироваться от 0%-100%. |
| VodiCTL_VPW_DYNAMIC_OUTPUT_PERIOD | Период времени (в микросекундахсекундах), за который необходимо выдать пользователю результат распознавания. Данный параметр можно использовать только при установленном параметре VodiCTL_VPW_DYNAMIC_WITH_DUPLICATE. |
| VodiCTL_VPW_DYNAMIC_OUTPUT_TIMEOUT | Минимально необходимое время наблюдения за номерной пластиной (в микросекундахсекундах), прежде чем выдать результат распознавания пользователю. Данный параметр может использоваться только при включенном режиме “Динамика”. В этом режиме производится наблюдение за траекторией движения автомобиля, и пользователь не сразу получает результат распознавания номера, а по прошествии времени, указанного для данной настройки. В таком случае первый результат распознавания будет заменен на более качественный и впоследствии выдан пользователю. Если для данного значения установлен параметр 0, пользователю выдается первый результат распознавания найденного номера. Следует учитывать, что по прошествии времени, указанного в данном параметре, наблюдение за траекторией номера продолжается, пока он не скроется из кадра. |
| VodiCTL_VPW_DYNAMIC_WITH_DUPLICATE | Включить/выключить периодическую выдачу результатов распознавания номерных пластин. |
VodiCTL_VPW_IMAGE_BLUR | Параметр, используемый для внутренних потребностей. Рекомендуется задавать значение 13. |
| VodiCTL_VPW_LOG_SETTINGS | Включить/выключить запись в лог-файл всех параметров распознавания. |
| VodiCTL_VPW_PLATE_FILTER_RODROPFACTOR | Коэффициент фильтрации номерных пластин по плотности изображения (вторая стратегия). Тип — unsigned. Данный коэффициент используется при бинаризации изображения и имеет оптимальные значения, которые определяются разработчиками с помощью собственных тестовых выборок. Параметр считается служебным, и задавать его значение нужно согласно рекомендациям специалистов технической поддержки. |
VodiCTL_VPW_PLATE_FILTER_ROFACTOR | Коэффициент фильтрации номерных пластин по так называемой плотности изображения — отношению количества белых пикселей к общему количеству пикселей (первая стратегия). Тип — unsigned. Данный коэффициент используется при бинаризации изображения и имеет оптимальные значения, которые определяются разработчиками с помощью собственных тестовых выборок. Параметр считается служебным, и задавать его значение нужно согласно рекомендациям специалистов технической поддержки. |
VodiCTL_VPW_PLATE_FILTER_SYMCOUNT | Включить/выключить алгоритм простого фильтра номерных пластин по минимальному количеству распознанных символов на них. Если алгоритм включен (значение параметра больше 0), производится базовый поиск символов на кандидате в номерную пластину (геометрия, пропорции). Если на кандидате символов определяется меньше, чем указано в значении данного параметра, этот кандидат не считается номерной пластиной. То есть значение данного параметра является минимальным количеством символов, которые должны присутствовать на кандидате в номерную пластину при работе базового алгоритма. |
| VodiCTL_VPW_PLATE_STAR_MAX | Максимальное количество нераспознанных символов на номерной пластине, при котором результат еще будет считаться результатом распознавания номерной пластины. |